



- Мобільність і вантажопідйомність
- Дослідження твердого тіла на прикладі крана-маніпулятора
- результати
- Виділення певного механізму в системі
- порівняння конструкцій
- Висновки і завантаження моделі
Крани-маніпулятори на автомобільному шасі часто використовуються для переміщення вантажів. У багатьох випадках ці вантажі мають значну масу, що впливає зі значною силою на різні частини крана. Дізнайтеся, як за допомогою моделювання можна визначити вплив цих сил і оптимізувати роботу крана.
Мобільність і вантажопідйомність
Конструкція кранів дозволяє піднімати і опускати вантажі, занадто важкі для людини. У багатьох областях застосування цих машин - від будівництва до обслуговування ліній електропередач - корисним перевагою також є мобільність. Крани-маніпулятори можна легко пересувати в різних напрямках, а також перевозити по автомобільним дорогам, що дозволяє уникнути витрат на додаткове транспортне обладнання.

Приклад крана-маніпулятора ( «Кран-маніпулятор Palfinger (Австрія). Конструкція з бетону (зроблена в Німеччині) є невеликою установкою для очищення стічних вод для будинку з чотирма і менш мешканцями». Автор: TM - власна робота. За ліцензією Creative Commons Attribution-Share Alike 2.0 Germany з Wikimedia Commons .)
Крани подібного типу оснащуються декількома гідравлічними циліндрами, які керують переміщенням маніпулятора, а також безліччю інших механізмів. При переміщенні важких вантажів на компоненти крана впливають значні сили. Використовуючи моделювання, ми зможемо дослідити вплив цих сил на кран під час його роботи і визначити способи поліпшення його експлуатаційних характеристик шляхом оптимізації конструкції.
Дослідження твердого тіла на прикладі крана-маніпулятора
Модель крана-маніпулятора досліджує сили, що діють на циліндри і шарнірні з'єднання крана при його експлуатації, використовуючи можливості модулів Динаміка багатотільних систем і Механіка конструкцій. Імпортована з моделі CAD геометрія крана складається з 14 частин, що рухаються відносно один одного.
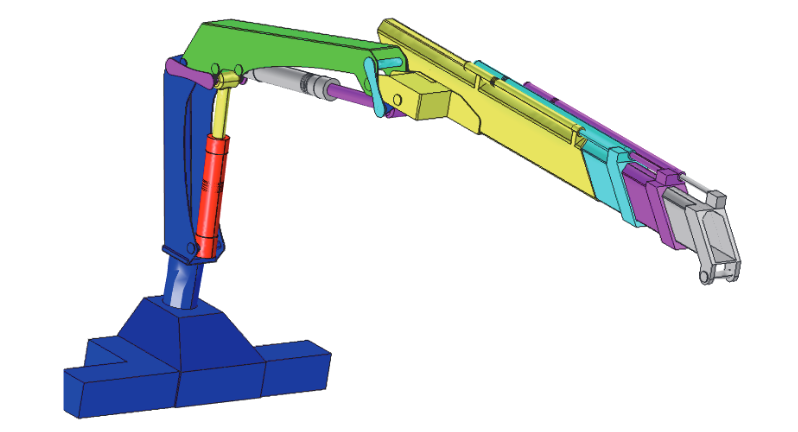
Геометрія крана-маніпулятора.
На малюнку нижче представлений більш детальний огляд важільних механізмів крана. Після малюнка наводиться таблиця, яка містить опис окремих компонентів.
Компонент Колір Підстава Синій Внутрішня секція стріли Зелений Зовнішня секція стріли Жовтий Телескопічні секції Блакитний, фіолетовий, сірий Циліндри механізму підйому стріли Червоний, сірий Поршні механізму підйому стріли Жовтий, фіолетовий Важільний механізм внутрішньої секції Фіолетовий, чорний Важільний механізм зовнішньої секції Блакитний, синій
В даному прикладі до крану прикладено дві навантаження: власна вага, спрямований в негативному напрямку по осі z, і корисне навантаження в 1000 кг, прикладена до його краю. Робочий цикл охоплює підняття вантажу з віддаленого положення і його переміщення під стрілу крана. Спочатку вантаж переміщується вгору, а потім - у напрямку до крану. Графік нижче зображує траєкторію краю крана протягом робочого циклу.
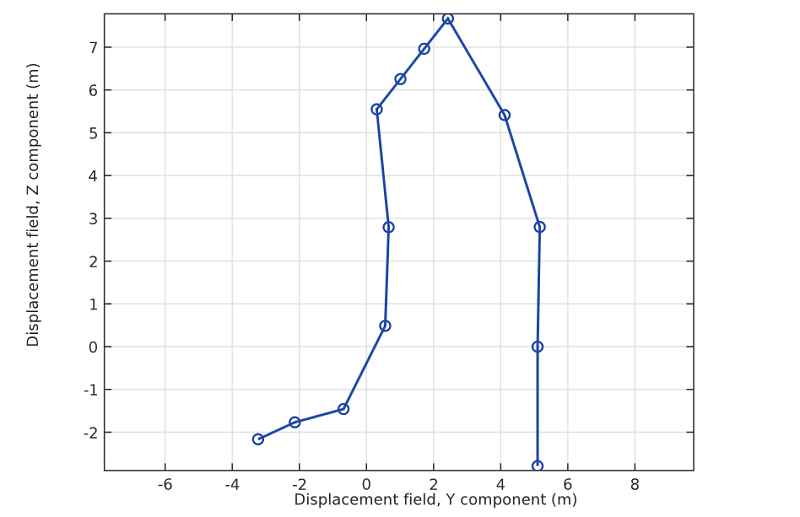
Траєкторія краю крана протягом робочого циклу.
Фактично кран управляється за допомогою зміни довжини трьох циліндрів: циліндра внутрішньої секції стріли, циліндра зовнішньої секції стріли і циліндрів телескопічного механізму. Циліндр внутрішньої секції стріли забезпечує її підняття, циліндр зовнішньої секції стріли регулює величину кута між внутрішньою і зовнішньою секціями, а циліндри телескопічного механізму регулюють виліт стріли. Оскільки це більш зручно, в даному випадку в якості параметрів використовуються кути нахилу секцій стріли, а не довжини циліндрів.
результати
На зображенні нижче представлено 9-е положення робочого циклу, в якому кут між внутрішньою секцією стріли і горизонталлю становить 45 °, кут між внутрішньою і зовнішньою секціями стріли становить -30 °, загальний виліт становить 1,5 м.
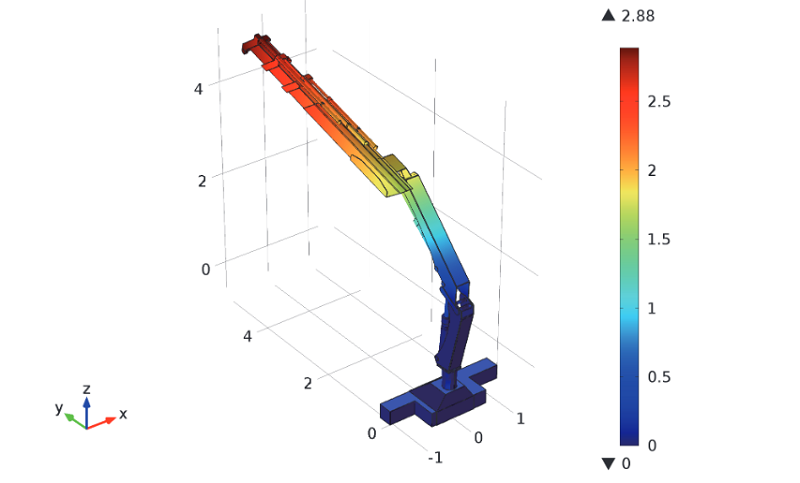
Кран в 9-му положенні робочого циклу. Кольором позначено загальне зміщення компонентів крана.
Тепер розглянемо вплив навантажень на різні частини крана. На кожному з представлених нижче графіків номер рішення відповідає положенню крана. У первісному положенні кран піднімає вантаж за допомогою подовженої стріли, а потім, в рішенні, відповідному останньому положенню, опускає вантаж поруч з собою.
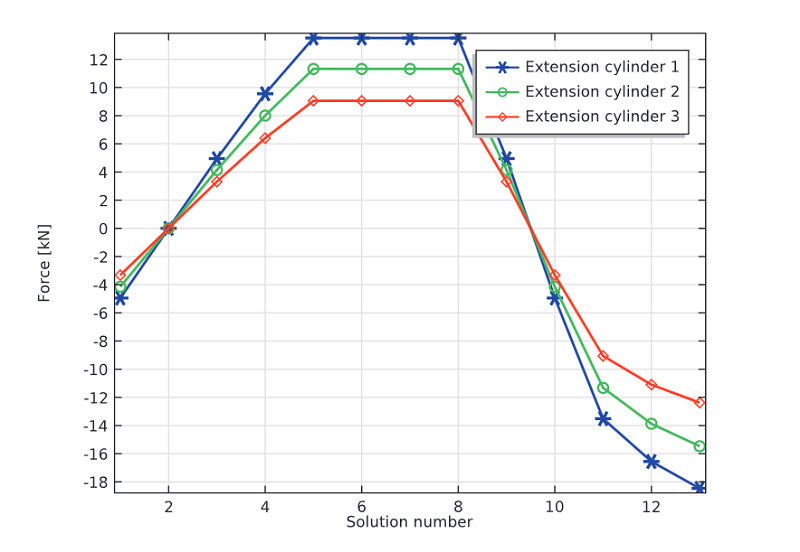
Почнемо з сил, що впливають на циліндри, керуючі положенням стріли. В даному випадку сили стиснення мають позитивний напрямок. Коли переміщуваний вантаж розташований далеко від підстави крана, сили, що впливають на циліндри, будуть більше за величиною, як і можна було припустити. Найбільша величина сили під час робочого циклу визначає необхідні характеристики циліндра.
Сили, що впливають на циліндри, керуючі положенням стріли.
На наступній діаграмі показані сили, що впливають на циліндри телескопічного механізму. Як і в попередньому прикладі, сила стиснення має позитивний напрямок. Циліндри внутрішньої секції розраховані на більш високі навантаження, оскільки їм необхідно переміщати вагу телескопічних сегментів на більшу відстань.
Сили, що впливають на циліндри телескопічного механізму.
І нарешті, ми можемо спостерігати сили, що діють на шарніри між основними частинами крана. Цей же спосіб може використовуватися для дослідження сил, які впливають на з'єднання між будь-якими частинами крана. Представлені нижче результати корисні для визначення конструкційних розмірів подібних компонентів.
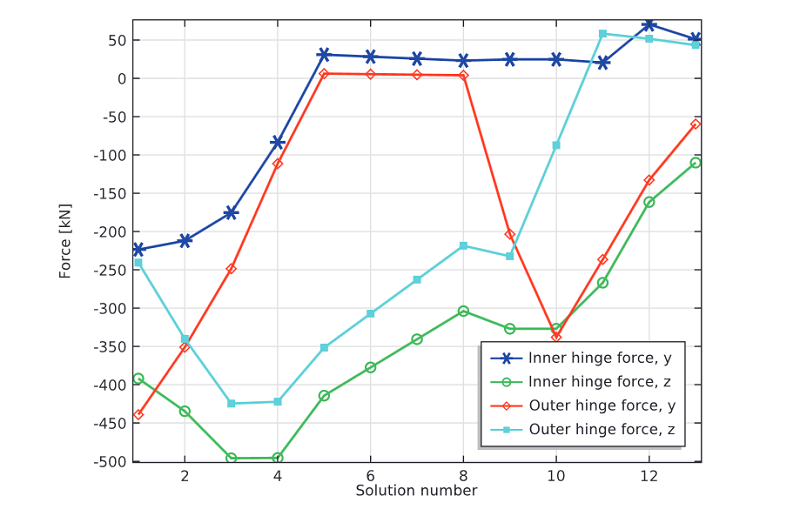
Сили, що впливають на шарніри.
Виділення певного механізму в системі
Тепер ми можемо використовувати модуль Оптимізація для поліпшення характеристик важільного механізму крана. Для цього можна використовувати модель Optimization of a Crane Link Mechanism (Оптимізація важільного механізму крана) , Яка є продовженням моделі Truck Mounted Crane (Кран-маніпулятор). У цьому випадку основна увага приділяється зниженню зусилля на циліндрі, необхідного для переміщення певного вантажу в умовах найгіршого сценарію циклу навантаження.
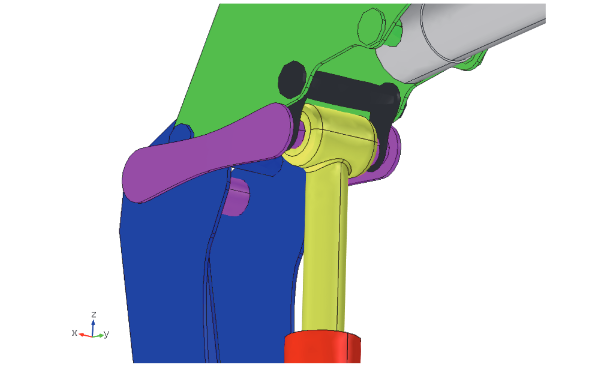
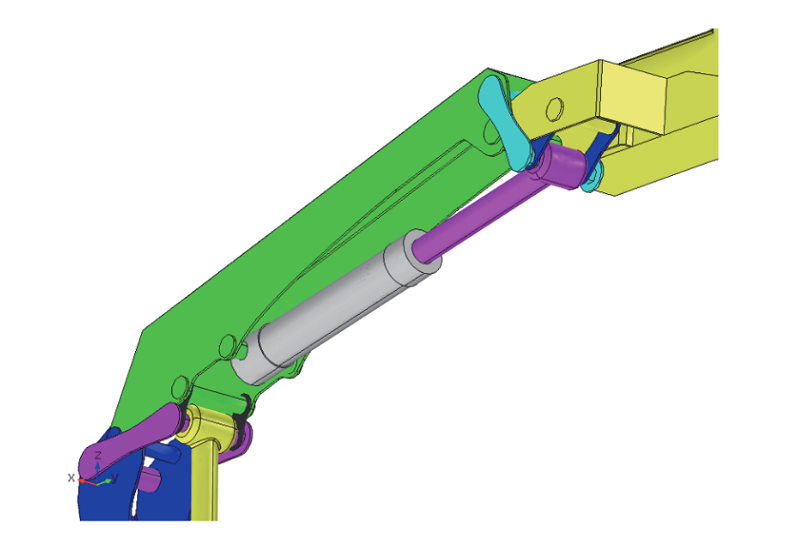
Детальний опис важільних механізмів автокрана.
Таблиця нижче містить найменування всіх використовуваних в моделі компонентів, а також їх колірні позначення.
Компонент Колір Підстава Синій Внутрішня секція стріли Зелений Циліндр механізму підйому стріли Червоний Поршень механізму підйому стріли Жовтий Важільний механізм Фіолетовий, чорний
Оскільки даний приклад призначений для випробування конструкції в умовах найгіршого сценарію, робочий цикл вибирається таким чином, щоб важільний механізм відчував максимально можливе навантаження. Для цього внутрішня секція стріли піднімається в крайнє верхнє положення, телескопічні елементи висуваються на максимальну довжину, а кут зовнішньої секції стріли вибирається таким чином, щоб забезпечити максимальне видалення краю крана. При цьому використовуються навантаження з вихідної моделі.
В рамках вирішення даного завдання оптимізації можна змінювати положення трьох осей. Перша вісь з'єднує перший важіль з підставою, друга - другий важіль зі стрілою, третя - два важелі з поршнем гідравлічного циліндра.
порівняння конструкцій
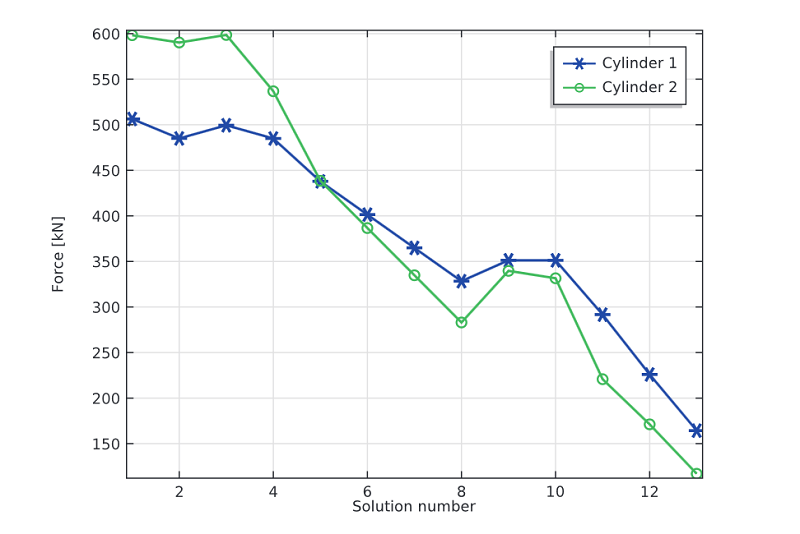
Тепер порівняємо наші результати. На першому графіку показано зміна зусилля на циліндрі під час робочого циклу. В даному випадку ми порівнюємо його максимальне значення протягом робочого циклу для визначення вантажопідйомності циліндра.
У порівнянні з вихідною конструкцією оптимізований варіант дозволив знизити максимальні зусилля з 597 кН до 413 кН, що становить 31% - значне поліпшення! Це дозволяє збільшити допустиму навантаження; крім того, зниження зусилля полегшує виконання критеріїв по напрузі для важільного механізму.
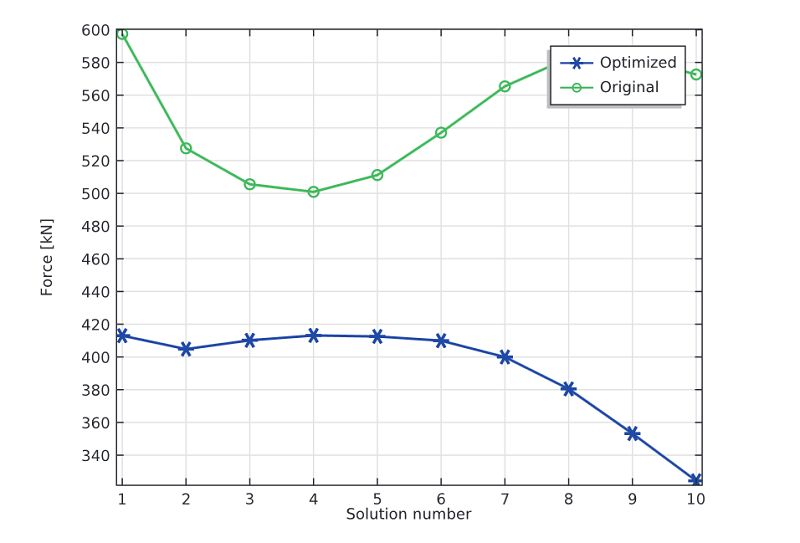
Порівняння зусилля на циліндрі в вихідному і оптимізованому варіантах конструкції.
На другому графіку представлені y- і z -компоненти, а також величина сили, що впливає на вісь, що утворить шарнір між підставою і стрілою. Як видно з представлених нижче результатів, результуюча сила в вихідної конструкції вище, ніж в оптимізованому варіанті.
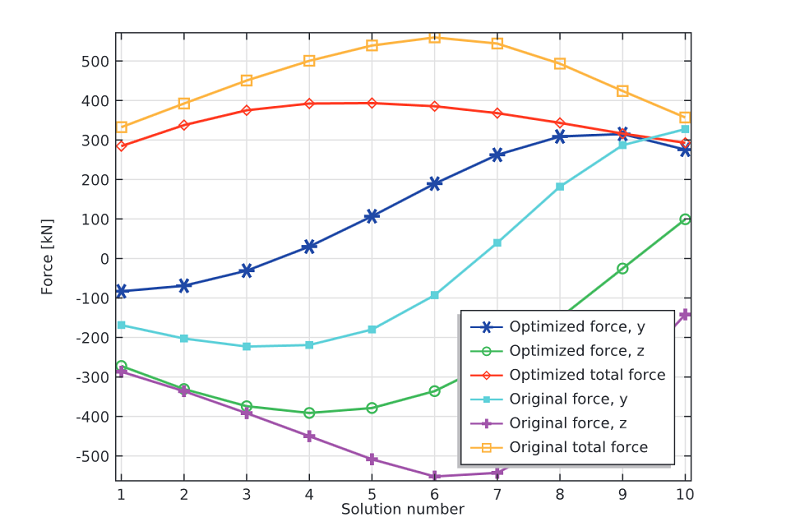
Сили, що діють на вісь, в оптимізованому і вихідному варіантах конструкції.
Висновки і завантаження моделі
До складу пакета COMSOL Multiphysics версії 5.0 ми включили дві нові моделі, призначені для дослідження взаємодій між різними компонентами крана-маніпулятора і оцінки ролі методів оптимізації в поліпшенні їх експлуатаційних характеристик. Дані приклади ілюструють можливості моделювання в частині дослідження впливу навантажень на подібні складні механічні системи, а також те, як отримані знання дозволяють поліпшити їх конструкцію.
Завантажити модель можна тут:
До речі, зараз ми розробляємо програму на основі даної моделі. Залишайтеся з нами.